

05.10.2021
3 minutes of reading




Are algorithms the ideal solution to make our highways safer by determining the best paths for vehicles? An end-of-studies project conducted at IFP School by a group of students from the “Powertrain engineering” program in partnership with Stellantis suggests as much. Highly promising results pave the way for a future deployment of the methodology implemented to support motorists and encourage them to join an existing or forming platoon in a smooth and automated manner.
For motorists, recourse to automation makes it possible to optimize highway traffic, enabling it to flow more freely and minimizing fuel consumption.
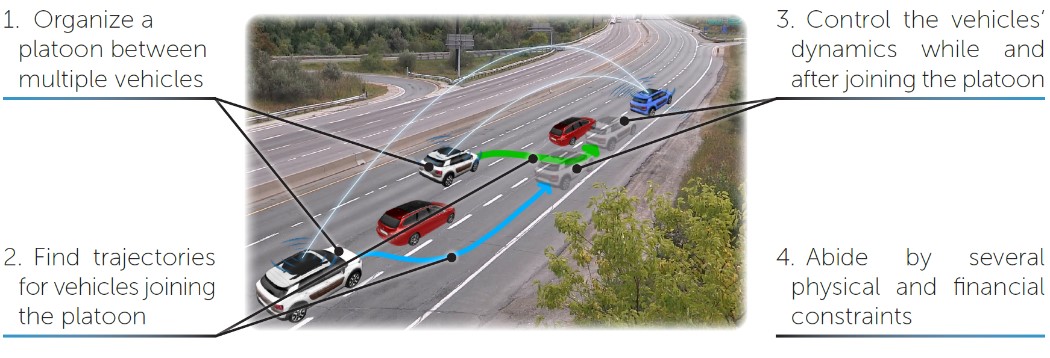
In this context of AHS , path planning enables a vehicle to automatically join an existing platoon with an optimized and “robust” path with respect to uncertain traffic obstacles on these busy lanes (Fig 1).
This traffic merging problem was the focus of research conducted at IFP School1, within the framework of a “Powertrain engineering ” program end-of-studies project, co-supervised by a representative from Stellantis, an industrial partner.
An original approach combining predictive control and algorithms…
To conduct the research, two tools were used in combination:
- MPC2 for the optimization of the planned path,
- a variant of the RRT3 algorithm for platoon formation.
This original combination made it possible to efficiently explore the space of possible paths and thus develop smooth paths incorporating the constraints of “vehicle dynamics” and a real-time implementation capacity. The latter takes into account location and mapping via appropriate sensors and a V2V4 communication system.
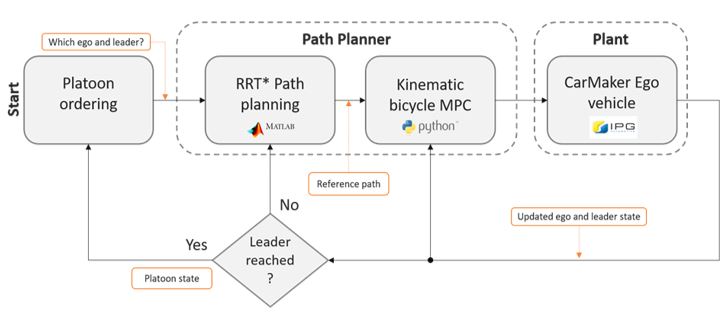
The complete algorithm (Fig.2) was tested for a variety of scenarios in order to validate the benefits of the proposed methodology. It should be noted that while the validation was conducted in a virtual vehicle environment, its implementation is independent of any specific environment.
…to develop ideal paths.
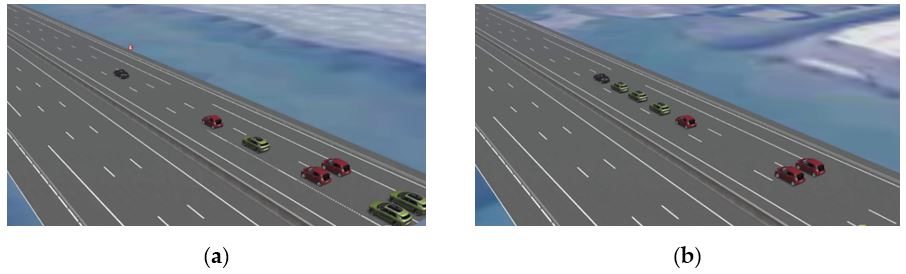
The results indicate that from a given initial scenario (any initial positions of vehicles in the platoon and its "leader", as well as traffic obstacles5), the method deployed makes it possible to generate the optimal paths to be followed to enable new vehicles to join a platoon or merge together to form one.(Fig. 3).
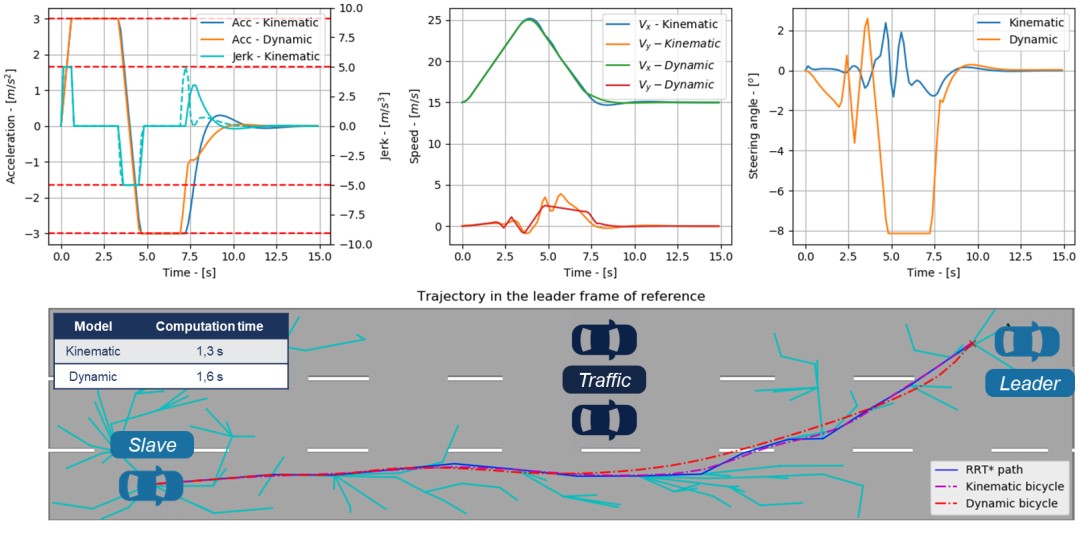
This success stems firstly from the fact that the RTT algorithm is not associated with long calculation times and secondly from the fact that the path is repeatedly updated via the use of a “bicycle-type” model for MPC prediction (Fig. 4).
These initial results are very encouraging in terms of the capacity to implement a path planner in real conditions. They pave the way for future studies taking into account highway driving practices, as described in the highway code, such as changing lanes, for example.
Towards calculation optimization
Thereafter, the improved use of informed-RRT6 should lead to a faster convergence of optimization calculations.
This research offers new opportunities for IFP School’s students, industrial partners and lecturers-researchers. It also contributes to the development of the teaching and research priorities of the ECAV Chair7
1. Automated Highway Systems
2. Model-based predictive control: advanced control technique for complex systems, using a dynamic model of the process inside the controller in real time, in order to anticipate the future behavior of the system
3. Rapidly-exploring Random Tree: an algorithm designed to efficiently search for non-convex, high-dimensional spaces
4. Vehicle-to-vehicle
5. Vehicles not part of the platoon
6. Method making it possible to directly sample the subset of a planning problem containing all possible improvements of a given solution
7. ECAV: Electric Connected and Autonomous Vehicles for Smart Mobility
Scientific contact : ouafae.el-ganaoui-mourlan@ifpen.fr
Références :
[1] Ouafae El Ganaoui-Mourlan, Stephane Camp, Thomas Hannagan, Vaibhav Arora, Martin De Neuville and Vaios Andreas Kousourna. Path Planning for Autonomous Platoon Formation. Sustainability 2021, 13, 4668. https://doi.org/10.3390/su13094668